 快捷导航
快捷导航
系统:PC
日期:2021-04-08
类别:图形图像
版本:v2021
Meshroom特别版是一款专门用来进行3D建模的图像处理工具,我们可以通过Meshroom最新版来对各种3D模型进行调整重建,并且你还可以按照自己的需要来完成全新的3D模型设计。
1、避免阴影和反射以及透明物体
2、确保可以从各个角度拍摄照片
3、避免在场景或背景中移动物体
4、可对模型角度进行自定义调整
5、内置多种便捷模型设计工具点击即可使用
6、以不同的模式拍摄多次,不会留下任何盲点
相机校准
内部摄像机参数可以从棋盘的多个视图中进行校准
相机缩小
缩小图像。默认值为0.5
相机本地化
基于SfM结果,我们可以执行摄像机定位并检索3D重建场景中动画摄像机的运动
预设值
本地化新图像(低,中,正常,高,超)时为特征提取器预设
媒体路径
装备的每个摄像机的视频文件路径,图像序列文件夹或文本文件
深度图
检索SfM已解析的所有摄像机的每个像素的深度值。
特征提取
从图像中提取特征,以及这些特征的描述符。它将根据您提取的特征类型来更改文件扩展名。
步骤1 –图像采集
拍摄质量是该过程中最重要和最具挑战性的部分。它对最终网格的质量产生巨大影响。
拍摄始终是折衷方案,以适应项目的目标和约束:场景大小,材质属性,纹理质量,拍摄时间,光量,变化的光线或物体,相机设备的质量和设置。
主要目标是获得清晰的图像,而没有运动模糊和深度模糊。因此,应使用三脚架或较快的快门速度来避免运动模糊,减小光圈(高f值)以获得较大的景深,并减小ISO以最大程度地减少噪点。
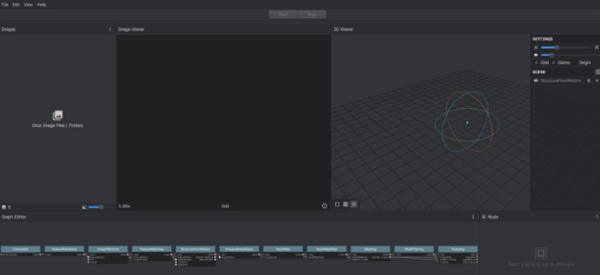
第2步– Meshroom概念和UI概述
网状室被认为可以解决两个主要用例:
以最少的用户操作轻松地从多个图像中获得3D模型。
为高级用户(例如:图形专家,研究人员)提供可以修改的解决方案,以适应他们的创意和/或技术需求。
因此,Meshroom依赖于一个节点系统,该系统将所有摄影测量管线步骤公开为带有参数的节点。上方的高级界面使任何人都可以使用Meshroom,而无需进行任何修改。
Meshroom使用者介面
步骤3 –基本工作流程
对于第一步,我们将仅使用高级UI。让我们使用“文件>另存为...”将这个新项目保存到我们的磁盘上。
Meshroom计算出的所有数据将最终保存在该项目文件旁边的“ MeshroomCache”文件夹中。请注意,项目是可移植的:您可以随后移动“ .mg”文件及其“ MeshroomCache”文件夹。缓存位置显示在窗口底部的状态栏中。
接下来,我们只需将图像拖放到左侧的“图像”区域中,即可将图像导入该项目。Meshroom会分析其元数据并设置场景。
Meshroom依靠摄像机传感器数据库来确定摄像机内部参数并将它们组合在一起。如果您的图像缺少元数据和/或使用Meshroom未知的设备拍摄,则会显示明确的警告来解释问题。在所有情况下,该过程都将继续,但结果可能会降低。
完成此操作后,我们可以按“开始”按钮并等待计算完成。彩色进度条有助于跟踪过程中每个步骤的进度:
绿色:已计算
橙色:正在计算
蓝色:提交进行计算
红色:错误
步骤4 –可视化并导出结果
通用摄影测量流程可以看作具有两个主要步骤:
SfM:运动结构(稀疏重建)
用所有摄像机的姿势(位置和方向)和内部校准推断刚性场景结构(3D点)。
结果是一组带有稀疏点云(Alembic文件格式)的已校准摄像机。
MVS:MultiView-Stereo(密集重建)
使用“运动结构”中的校准摄像机生成密集的几何表面。
最终结果是一个带纹理的网格(OBJ文件格式以及相应的MTL和纹理文件)。
一旦获得“运动结构”的结果,它就会由Meshroom自动加载。至此,我们可以在“图像”面板(带有绿色相机图标)中看到已经成功重建了哪些相机,并可视化了场景的3D结构。我们还可以在“图像”面板中选择图像,以在3D Viewer中查看相应的相机,反之亦然。
图像选择在“图像”和“ 3D查看器”面板之间同步。
3D Viewer的互动与Sketchfab的互动非常相似:
单击并移动以围绕视图中心旋转
双击几何体(点云或网格)以定义视图中心
备选:Ctrl +单击
中鼠标单击以平移
替代:Shift +点击
向上/向下滚轮放大/缩小
备选方案:Alt +右键单击并向左/向右移动
计算完整个管线后,可使用3D Viewer底部的“加载模型”按钮加载和可视化带纹理的3D网格。
热门推荐
相关应用
实时热词
评分及评论
好东西,马上试试效果!
这个好东西啊
这样都不能满足你就不知道什么能满足你了
感觉很不错,下载看看
牛,这个软件要收藏了,太方便了。

贵州网院电脑版58.11MB教育学习v1.29
查看
23j909图集PDF免费下载43.4MB图形图像v1.0
查看
WPS Office2025破解版341.6MB办公软件v12.1.0.23542
查看
中国银行网银助手企业版官方版下载36.4MB硬件驱动v4.0.9.1
查看
IntelliJ IDEA2026破解版1.47GB编程开发v2026.1
查看
中国银行网银助手官方版下载36.4MB网络工具v4.0.9.1
查看
Office2024破解版3.1GB办公软件v16.0.17102
查看
造梦西游3修改器下载10.4MB杂类工具v12.0
查看














点击星星用来评分